
5. Mai 2023 ǀJellyfish-Bot heißt der von Quallen inspirierte Unterwasserroboter, der Abfälle vom Meeresgrund aufsammeln soll. Entwickelt wird er von Robotikern des Max-Planck-Instituts für Intelligente Systeme in Stuttgart.
Die Erdoberfläche ist zum größten Teil mit Meeren bedeckt, die leider stark verschmutzt sind. Eine der Strategien zur Bekämpfung der Müllberge in diesen sehr empfindlichen Ökosystemen – insbesondere in der Nähe von Korallenriffen – ist der Einsatz von Robotern. Doch Unterwasserroboter sind meist sperrig mit unbeweglichen Körpern, die nicht in der Lage sind, komplexe Umgebungen zu erkunden oder Proben zu nehmen. Zudem sind sie relativ laut aufgrund von Elektromotoren oder Hydraulikpumpen.
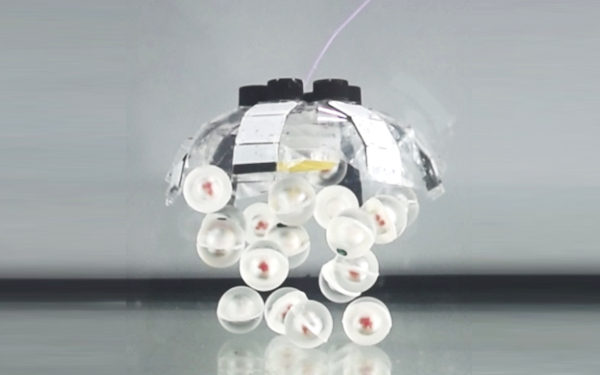
Auf der Suche nach einem geeigneteren Design haben sich Wissenschaftler am Max-Planck-Institut für Intelligente Systeme (MPI-IS) in Stuttgart von der Natur inspirieren lassen. Sie konfigurierten einen Quallen-ähnlichen, vielseitigen, energieeffizienten und nahezu geräuschlosen Roboter so groß wie eine Hand. Jellyfish-Bot ist eine Zusammenarbeit zwischen den beiden Abteilungen für Physische Intelligenz und für Robotik-Materialien am MPI-IS.
Anmutig schwimmender Roboter
Für den Bau des Roboters verwendete das Team elektrohydraulische Aktuatoren, durch die Strom fließt. Die Aktuatoren dienen als künstliche Muskeln, die den Roboter antreiben. Um diese Muskeln herum befinden sich Luftkissen sowie weiche und starre Komponenten, die den Roboter stabilisieren und ihn wasserdicht machen. Auf diese Weise kommt die Hochspannung, die durch die Aktuatoren fließt, nicht mit dem umgebenden Wasser in Berührung. Strom fließt in regelmäßigen Abständen durch dünne Drähte, wodurch sich die Muskeln zusammenziehen und ausdehnen. Dadurch kann der Roboter anmutig schwimmen und Strudel unter seinem Körper erzeugen.
„Wenn eine Qualle nach oben schwimmt, kann sie Objekte auf ihrem Weg einfangen, da sie Strömungen um ihren Körper herum erzeugt. Auf diese Weise sammelt sie auch Nährstoffe. Auch unser Roboter lässt das Wasser um ihn herum zirkulieren. Diese Funktion ist nützlich, um Objekte wie Abfallpartikel zu sammeln. Er kann den Abfall dann an die Oberfläche befördern, wo die Partikel später recycelt werden. Er ist auch in der Lage, Proben wie z.B. Fischeier zu nehmen. Dabei hat die Maschine keine negativen Auswirkungen auf die Umgebung oder die Meeresbewohner, und er ist nahezu geräuschlos“, erklärt Tianlu Wang. Er ist Postdoc in der Abteilung für Physische Intelligenz am MPI-IS und Erstautor der Publikation.
Unterwasserroboter sollen Ozeane säubern
Sein Mitautor Hyeong-Joon Joo aus der Abteilung für Robotik-Materialien ergänzt: „Schätzungsweise sinken 70 % des Mülls auf den Meeresboden. Mehr als 60 % dieses Mülls besteht aus Kunststoffen, die Hunderte von Jahren brauchen, um sich zu zersetzen. Daher war es für uns wichtig, einen Roboter zu entwickeln, der Objekte wie Abfälle bewegen und nach oben transportieren kann. Wir hoffen, dass Unterwasserroboter eines Tages bei der Säuberung unserer Ozeane helfen können“.
Jellyfish-Bot ist in der Lage, Objekte berührungslos zu bewegen und einzufangen, wobei er entweder allein oder als Schwarm arbeiten kann. Der Roboter arbeitet schneller als andere vergleichbare Erfindungen und erreicht eine Geschwindigkeit von bis zu 6,1 cm/s. Außerdem benötigt Jellyfish-Bot nur eine geringe Leistung von etwa 100 mW. Und er ist sicher für Menschen und Fische, sollte das Polymer, das den Roboter isoliert, irgendwann zerreißen. Gleichzeitig sind die Geräusche des Roboters nicht von den Hintergrundgeräuschen zu unterscheiden. Auf diese Weise interagiert Jellyfish-Bot sanft mit seiner Umgebung, ohne sie zu stören – genau wie sein natürliches Vorbild.
Polymerschicht und künstliche Muskeln
Der Roboter besteht aus mehreren Schichten: Einige stabilisieren den Roboter, andere machen ihn schwimmfähig oder dichten ihn ab. Eine weitere Polymerschicht fungiert als Schwimmhaut. In der Mitte der verschiedenen Schichten sind elektrisch betriebene künstliche Muskeln eingebettet, sogenannte HASELs. HASELs sind mit Pflanzenöl gefüllte Kunststoffbeutel, die teilweise von Elektroden bedeckt sind. Durch Anlegen einer Hochspannung an eine Elektrode wird der Muskel positiv aufgeladen, während das umgebende Wasser negativ geladen ist. Dadurch entsteht eine Kraft zwischen der positiv geladenen Elektrode und dem negativ geladenen Wasser, die das Öl innerhalb des Beutels hin- und herschiebt, wodurch sich die Beutel zusammenziehen und entspannen – ähnlich wie ein echter Muskel. HASELs können hohen elektrischen Spannungen standhalten, die von den geladenen Elektroden erzeugt werden, und sind durch eine Isolierschicht vor Wasser geschützt. Das ist wichtig, da HASEL-Muskeln bisher noch nie für den Bau eines Unterwasserroboters verwendet wurden.
Zunächst entwickelten die Forscher Jellyfish-Bot mit einer Elektrode und sechs Fingern oder Armen. Im zweiten Schritt teilte das Team die einzelne Elektrode in einzelne Gruppen auf, um sie unabhängig voneinander zu betätigen.
„Wir konnten Objekte greifen, indem wir vier der Arme zum Schwimmen und die anderen beiden als Greifer einsetzten. Oder wir betätigten nur eine Teilmenge der Arme, um den Roboter in verschiedene Richtungen zu lenken. Wir haben auch untersucht, wie wir eine Gruppe mehrerer Roboter betreiben können. Zum Beispiel haben wir zwei Roboter eine Corona-Schutzmaske aufheben lassen, was für einen einzelnen Roboter sehr schwierig ist. Zwei Roboter können auch zusammenarbeiten, um schwere Lasten zu tragen. Aktuell jedoch braucht unser Jellyfish-Bot ein Kabel. Das ist ein Nachteil, wenn wir ihn wirklich eines Tages im Ozean einsetzen wollen“, sagt Hyeong-Joon Joo.
Ziel sind kabellose Roboter
Eventuell gehören mit Kabeln angetriebene Roboter bald der Vergangenheit an.
„Unser Ziel ist es, kabellose Roboter zu entwickeln. Glücklicherweise haben wir den ersten Schritt in Richtung dieses Ziels erreicht. Wir haben alle Funktionsmodule wie die Batterie und die drahtlosen Steuerungseinheiten eingebaut, um in Zukunft drahtlose Manipulationen zu ermöglichen“, so Tianlu Wang weiter.
Das Team befestigte eine Steuerungseinheit an der Oberseite des Roboters und eine Batterie und einen Mikrocontroller an der Unterseite. Anschließend schwamm Jellyfish-Bot im Teich des Max-Planck-Campus Stuttgart. Die Forschenden konnten ihn erfolgreich geradeaus steuern. Bislang konnte das Team den kabellosen Roboter jedoch nicht dazu bringen, den Kurs zu ändern und in eine andere Richtung zu schwimmen.
Doch wenn man das Team kennt, kann man davon ausgehen, dass es nicht lange dauern wird, bis dieses Ziel erreicht ist.
Originalpublikation:
T. Wang, H. Joo, S. Song, W. Hu, C. Keplinger, M. Sitti :A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation, Science Advances 2023, 9/15, DOI: 10.1126/sciadv.adg0292





")
